Time model
The time model gives the relative time of each data element. These times are created by a sensor calibration process. The times within the data are measured in time ticks. Depending on the timing resolution desired, the number of time ticks can be increased or decreased during the calibration process. There should be at least an order of magnitude more ticks than samples in a particular dimension to enable the ticks to describe any aberrations or non-linearity in the timing.
A sensor’s data has duration equal to the difference between the time of last sample and time of first sample. We divide the data duration into a number of evenly divided time ticks. Each data time occurs on a specific time tick relative to the first data. The time model provides the time that a particular data element is captured.
The time model is important for sensors such as line scanners and conical scanners. For sensors such as the typical digital camera that capture all of their samples simultaneously, the time model would be a set of zeroes.
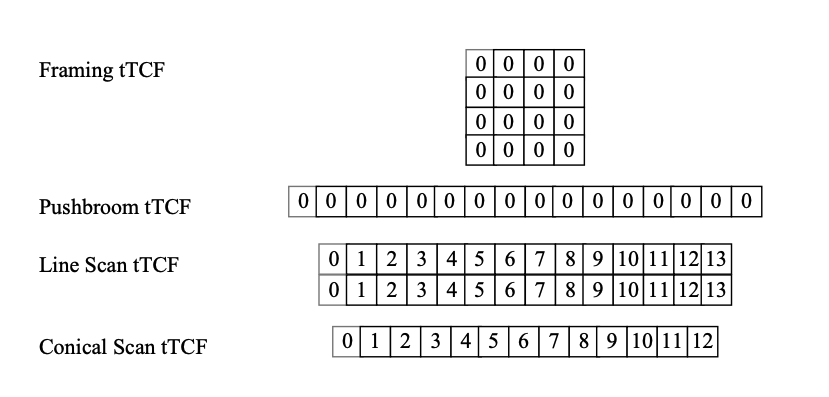
Figure 21 Different time models
The time model is represented by the following equation:

The time model Mt is a sequence of n values, one value t for each sample. Thus, in the time model, the value (t25) would provide the time of the 25th sample relative to the first sample in the sensor’s characteristic frame. Remember that the sequence of the model is the sequence of the data from the sensor.