Ambiguity space
We calculate the origin of the sensor energy by determining the intersection between the sensor data instantaneous field of influence (IFOI) with one or more ambiguity spaces. The space of the origin of the phenomenon is equal to the intersection of the shape space of the ambiguity intersected with the shape space of the instantaneous field of influence.

In the theory of sensor fusion, all sensors are treated as in situ sensors. A sensor simply measures the response to energy at a particular point in space within a particular instantaneous field of influence. We know where the sensor received the energy and we know which direction the energy came from, but we do not know the point where the energy came from. In order to know which point the energy came from, that is, to resolve the phenomenon to a geo-location, then we must intersect the IFOI with one or more ambiguity spaces.
We resolve the energy origin for all sensors the same way. Figure 22 shows an example of how to resolve a camera image. Knowing the IFOI orientation of a pixel, we can intersect the vector with a terrain model. The point of intersection is the origin of the energy.
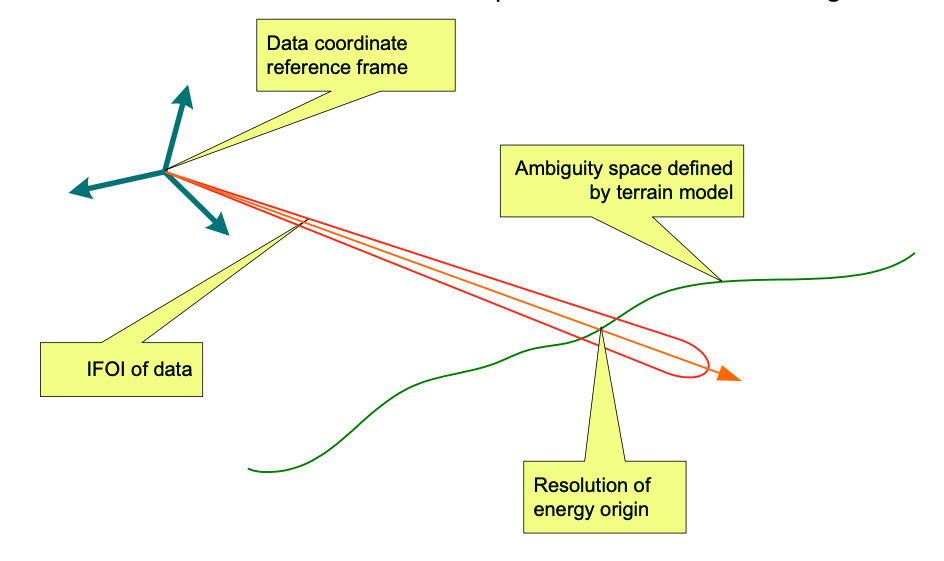
Figure 22 Resolution of image data with a terrain model
Radar is resolved in a similar manner, except the ambiguity space is not a terrain model. The radar system determines location by creating its own ambiguity space. An actuator generates a chirp at a known time interval. The sensor receives the chirp a given time. The point in time defines a sphere, that is, an ambiguity space in which the chirp would have travel there and back in that amount of time.
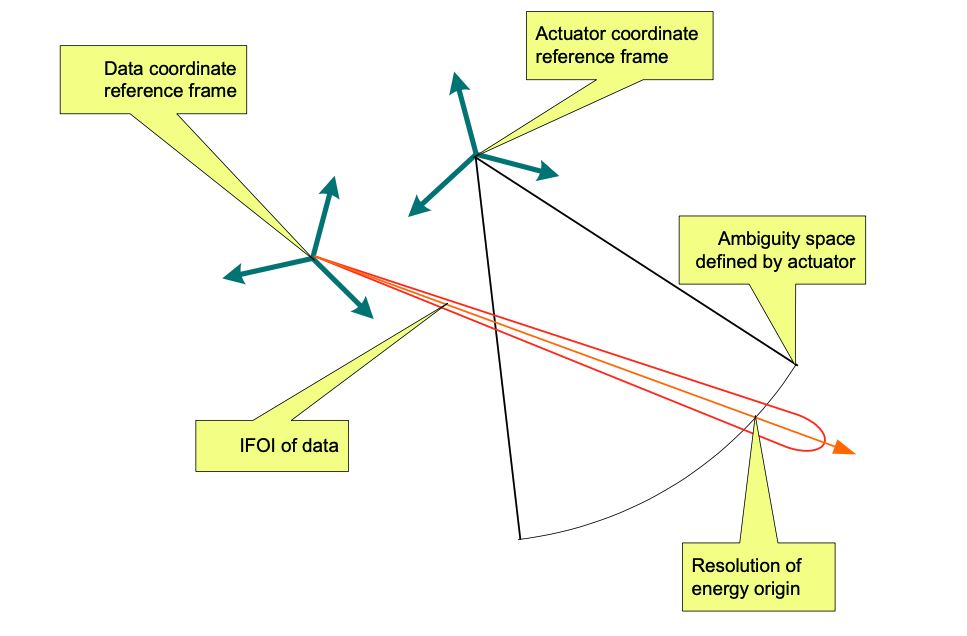
Figure 23 Resolution of radar data