Introduction
Definitions
The objective of sensor fusion is to determine that the data from two or more sensors correspond to the same phenomenon. A sensor is an electromechanical device that translates the energy of a physical phenomenon into a signal. Examples of sensors are digital thermometers and video cameras. An actuator is an electromechanical device that translates a signal into a physical phenomenon. Sensors and actuators are both instances of transducers. A transducer translates between a signal in the digital realm and energy in the physical realm. Sensors and transducers combine into systems. Radar is a system that combines transmitters and receivers.
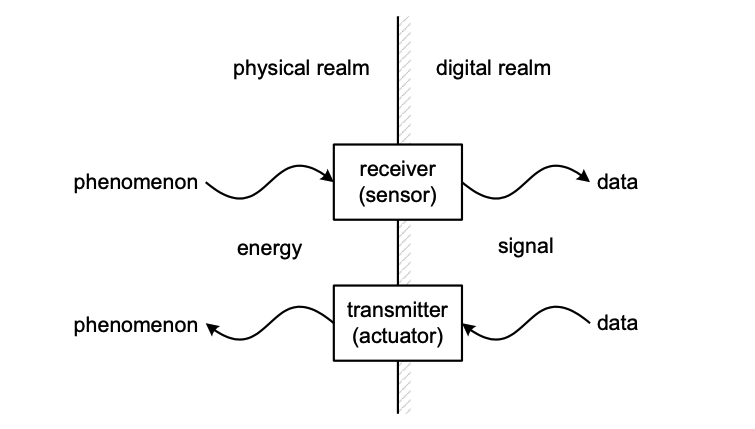
Figure 1 Transducer reference model
When discussing sensor fusion, it is convenient to use the terms physical realm and digital realm. The phenomena occur in the physical realm. The sensor reacts to the phenomena to produce an electronic signal, either analog or digital. The signal is interpreted into data and it exists in the digital realm. Thus, we would say that the sensor translates a phenomenon in the physical realm into a corresponding data in the digital realm.
There would be no need to think in terms of the digital realm without the Internet. Before the Internet, a signal would exist inside a single isolated machine or a well-defined isolated system. With the advent of the Internet, a single processor can access the signals from any number of sensors. Thus, the challenge of sensor fusion is predicated upon the existence of an Internet, a universal network of networks.
Before the Internet, the association between two or more sensors would only occur within a single well-defined system. The engineers would be able to determine and define the interdependencies of the sensor signals in the design of the system. With the Internet, we can now access the signals of several sensors on an ad hoc basis. This capability is useless, however, without some means to determine the interdependencies of the sensors.
Munen Muso
The transducer reference model is critical to understanding sensor fusion. Look at it carefully. The model shows that:
- A phenomenon produces energy
- The sensor creates a signal that corresponds with the energy
- The signal is captured as data in the digital realm
Many times we catch ourselves thinking about the data as the energy or the phenomenon itself. Such thinking only leads to confusion and overly complicated systems that do not work.
Munen muso is a Japanese phrase that translates roughly to “no design, no concept.” When thinking of sensor fusion, it is important to keep this phrase in mind. Sensor data is just data, nothing more. A sensor does not know what it is observing, and sensor data has no concept of what it represents. Sensor data is in the digital realm. What sensor data represents is in the physical realm. It requires some type of processing to equate one to the other, even in the simplest cases.
GPS data is a good example for applying this concept. GPS data is not position, it is just data. Position is a concept that exists in the physical realm. GPS data exists in the digital realm. We know GPS data is position data because we as humans have processed the data and placed it into context. However, with sensor fusion, we want the computers to process the information for us. When we start imposing our processing of data onto the data itself, then we hamper the computer’s processing of the data.
Sensor data is just data. Treat it as such. Remember that when discussing sensor fusion, you are discussing the digital realm, not the physical realm. The confusion arises because we are discussing things in the digital realm that have a correlation with things in the physical realm. It is only a correlation; they are not the same thing, and the correlation can only be achieved through some level of processing, human or otherwise.
Fundamental theory of sensor fusion
The objective of sensor fusion is to determine that the data from two or more sensors correspond to the same phenomenon. We say that the data of two or more sensors correspond to the same phenomenon if the energy corresponding with the data originates from the same place and time. The challenge then becomes how to accurately determine the origin and time of the energy corresponding to sensor data.
The data of one sensor can be the parameter of another sensor. For instance, the gain of one sensor may be determined by the ambient temperature, which is the data of another sensor. The key to sensor fusion is to treat position sensors as sensors. Every transducer has a position and attitude relative to a standard datum or relative to the data of another transducer. A datum is a coordinate reference system. For sensor fusion, the datum is the earth coordinate system with the earth centered and fixed, that is, we treat the earth as if it does not move.